Qualitative Model Comparison with Saliency
This example demonstrates the use of xaitk-saliency to qualitatively compare two different models using saliency maps.
The models we compare here both perform object detection and are trained on the Visdrone dataset.
The first is CenterNet using a ResNet50 backbone and the second is a modified version of YOLOv5 called TPH-YOLOv5.
We use the high-level GenerateObjectDetectorBlackboxSaliency interface to generate visual saliency for reference predictions made by each of our detectors.
To run this notebook in Colab, use the link below:
![]()
Note, this is a compute-intensive notebook and the free resources provided by Colab may not be sufficient for successful execution within Colab’s runtime limits.
Setup Environment
Here we install xaitk-saliency and the “centernet” extra for smqtk-detection which includes the dependencies for the PyTorch-based CenterNetVisdrone class.
Note for Colab users: after setting up the environment, you may need to “Restart Runtime” in order to resolve package version conflicts (see the README for more info).
from __future__ import annotations
import logging
logging.basicConfig(level=logging.WARNING)
import sys # noqa
!{sys.executable} -m pip install -qU pip
print("Installing xaitk-saliency...")
!{sys.executable} -m pip install -q git+https://github.com/xaitk/xaitk-saliency.git
print("Installing smqtk-detection...")
!{sys.executable} -m pip install -qU smqtk-detection[centernet]
# Remove opencv-python, which requires libGL, which we don't require here, and replace with opencv-python-headless
print("Installing headless OpenCV...")
!{sys.executable} -m pip uninstall -qy opencv-python opencv-python-headless # make sure they're both gone.
!{sys.executable} -m pip install -q opencv-python-headless
print("Done!")
Installing xaitk-saliency...
Installing smqtk-detection...
Installing headless OpenCV...
Done!
Download Image File and Visualize
We are using a single example image from the VisDrone test dataset. This image contains several classes and is dense in nature, providing several reference detections.
# Use JPEG format for inline visualizations
%config InlineBackend.figure_format = "jpeg"
%matplotlib inline
import os
import urllib
from collections.abc import Sequence
from typing import Any
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image
data_dir = "./data"
os.makedirs(data_dir, exist_ok=True)
img_path = os.path.join(data_dir, "visdrone_img.jpg")
if not os.path.isfile(img_path):
_ = urllib.request.urlretrieve("https://data.kitware.com/api/v1/item/623880f14acac99f429fe3ca/download", img_path)
img = np.asarray(Image.open(img_path))
plt.figure(figsize=(12, 12))
plt.axis("off")
_ = plt.imshow(img)

TPH-YOLOv5 Detector
Clone Repository
We will clone the TPH-YOLOv5 implementation from the author’s github page and add the destination directory to our system path. This will allow us to use the tools and models that are contained in the repository for this example. In general, this is poor practice, but we are doing it here for the sake of this self-enclosed example.
In lieu of installing all of the requirements for the repository, we will install just the ones required for the tools that we will use.
This is a subset of the repository’s requirements.txt.
dest = "./data/tph-yolov5"
if not os.path.isdir(dest):
!git clone -q https://github.com/cv516Buaa/tph-yolov5.git {dest}
print("Installing needed requirements...")
# torch 1.11 has compatability issues
!{sys.executable} -m pip -q install "torch>=2.0.2,<2.6" torchvision
!{sys.executable} -m pip -q install tqdm
!{sys.executable} -m pip -q install seaborn
print("Done!")
sys.path.insert(1, dest)
Installing needed requirements...
Done!
DetectImageObjects Implementation
To use the TPH-YOLOv5 model with the GenerateObjectDetectorBlackboxSaliency interface, we need to create an implementation of DetectImageObjects that wraps the underlying model.
The core method that requires implementation is detect_objects() which takes images and outputs predictions for each image in the format defined by the interface.
# imports from TPH-YOLOv5 github repo
import time
from collections.abc import Hashable, Iterable
import numpy as np
import torch
from models.experimental import attempt_load
# smqtk imports
from smqtk_detection import DetectImageObjects
from smqtk_detection.utils.bbox import AxisAlignedBoundingBox
from torch.utils.data import DataLoader, Dataset
from utils.augmentations import letterbox
from utils.general import non_max_suppression, scale_coords
class YOLOVisdrone(DetectImageObjects):
"""DetectImageObjects implementation using YOLOVisdrone"""
def __init__(
self,
weights: str,
img_size: tuple[int, int] = (640, 640),
batch_size: int = 1,
conf_thresh: float = 0.5,
iou_thresh: float = 0.5,
use_cuda: bool = False,
num_workers: int = 4,
log_interval: int | None = None,
) -> None:
"""
img_size: size of image input to model
batch_size: number of images to input as once
conf_thresh: confidence threshold for detection results
iou_thresh: IOU threshold for NMS
use_cuda: use CUDA device to compute detections
num_workers: number of worker processes to use for data loading
log_interval: interval in batches to log messages during
"""
self.img_size = np.array(img_size)
if use_cuda:
self.device = torch.device("cuda:0")
else:
self.device = torch.device("cpu")
self.model = attempt_load(weights).to(self.device)
self.model = self.model.eval()
self.conf_thresh = conf_thresh
self.iou_thresh = iou_thresh
self.batch_size = batch_size
self.num_workers = num_workers
self.log_interval = log_interval
with torch.no_grad():
_ = self.model(torch.zeros(1, 3, *self.img_size).to(self.device)) # warm up
def detect_objects(
self,
img_iter: Iterable[np.ndarray],
) -> Iterable[Iterable[tuple[AxisAlignedBoundingBox, dict[Hashable, float]]]]:
"""Generate detections for input images"""
# pytorch DataLoader for passed images
dataset = DataLoader(
PytorchDataset(
img_iter,
img_size=self.img_size,
),
batch_size=self.batch_size,
num_workers=self.num_workers,
)
# list of AxisAlignedBoundingBox detections to return
preds = []
for i, (img_batch, hs, ws) in enumerate(dataset):
if self.log_interval is not None and (i + 1) % self.log_interval == 0:
logging.info(f"[{i + 1}/{len(dataset)}]")
# load batch and normalize
img_batch = img_batch.to(self.device)
img_batch = img_batch.float()
img_batch /= 255
# pass through model
with torch.no_grad():
pred_batch = self.model(img_batch)[0]
# perform NMS and scale detections to original image dimensions
for img_pred, h, w in zip(pred_batch, hs, ws):
img_pred = non_max_suppression(img_pred[None], conf_thres=self.conf_thresh, iou_thres=self.iou_thresh)[
0
]
img_pred[:, :4] = scale_coords(img_batch.shape[2:], img_pred[:, :4], (h, w))
img_pred = img_pred.cpu().numpy()
preds.append(pred_mat_to_list(img_pred))
return preds
def get_config(self) -> dict[str, Any]:
"""Requried by interface"""
return {}
class PytorchDataset(Dataset):
"""
pyTorch DataLoader for images. Resizes image to model input size and
returns original height and width as well.
"""
def __init__(self, imgs: Sequence[np.ndarray], img_size: tuple[int, int] | None = None) -> None:
"""Intialize dataloader"""
if img_size is None:
img_size = [640, 640]
self.imgs = list(imgs)
self.img_size = img_size
def __getitem__(self, idx: int) -> tuple[np.ndarray, int, int]:
"""Return a tuple of the image, image height, and image width"""
img = self.imgs[idx]
h = img.shape[0]
w = img.shape[1]
img = letterbox(img, new_shape=self.img_size, auto=True)[0]
img = img.transpose((2, 0, 1))
img = np.ascontiguousarray(img)
return img, h, w
def __len__(self) -> int:
"""Return the number of imgs"""
return len(self.imgs)
def pred_mat_to_list(preds: Sequence[np.ndarray]) -> Sequence[AxisAlignedBoundingBox]:
"""Convert prediction matrix model output to AxisAlignedBoundingBox format."""
pred_list = []
for pred in preds:
bbox = AxisAlignedBoundingBox(pred[0:2], pred[2:4])
score_dict = dict.fromkeys(range(1, 11), 0)
score_dict[pred[5] + 1] = pred[4]
pred_list.append((bbox, score_dict))
return pred_list
/home/local/KHQ/elim.schenck/anaconda3/envs/test/lib/python3.9/site-packages/tqdm/auto.py:22: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
Instantiate Detector Object
Now we will instantiate our YOLO detector object using the YOLOVisdrone class we just declared.
We use an input size of 1536x1536, confidence threshold of 0.1, and a IOU threshold of 0.5.
Setting use_cuda to True here will decrease computation time if you have a CUDA device available.
# download weights
model_file = os.path.join(data_dir, "tph-yolov5.pth")
if not os.path.isfile(model_file):
urllib.request.urlretrieve("https://data.kitware.com/api/v1/item/623880d04acac99f429fe3bf/download", model_file)
yolo_detector = YOLOVisdrone(
weights=model_file,
img_size=(1536, 1536),
batch_size=1,
use_cuda=False,
num_workers=8,
conf_thresh=0.1,
iou_thresh=0.5,
log_interval=1,
)
CenterNet Detector
The SMQTK-Detection package provides the CenterNetVisdrone class, a DetectImageObjects implementation wrapping a PyTorch version of CenterNet.
It allows us to choose from a selection of different backend architectures, from which we will choose ResNet50.
Again, setting use_cuda to True here will accelerate saliency computation for this model.
import urllib
from smqtk_detection.impls.detect_image_objects.centernet import CenterNetVisdrone
# download weights
model_file = os.path.join(data_dir, "centernet-resnet50.pth")
if not os.path.isfile(model_file):
urllib.request.urlretrieve("https://data.kitware.com/api/v1/item/623259f64acac99f426f21db/download", model_file)
centernet_detector = CenterNetVisdrone(
arch="resnet50",
model_file="data/centernet-resnet50.pth",
max_dets=500,
use_cuda=False,
batch_size=1,
num_workers=1,
)
Get Image Predictions
We will pass our image through both of our models to obtain predictions to potentially generate saliency for.
%matplotlib inline
import matplotlib.axes
from matplotlib import pyplot as plt
from matplotlib.patches import Rectangle
print("Getting TPH-YOLOv5 image predictions...")
start = time.time()
yolo_dets = yolo_detector([img])[0]
end = time.time()
print(f"Done in {end - start:.2f}s")
print("Getting CenterNet image predictions...")
start = time.time()
centernet_dets = centernet_detector([img])[0]
end = time.time()
print(f"Done in {end - start:.2f}s")
CLASS_NAMES = ["pedestrian", "people", "bicycle", "car", "van", "truck", "tricycle", "awning-tricycle", "bus", "motor"]
def show_dets(ax: matplotlib.axes.Axes, dets: np.ndarray, thresh: float = 0.5, show_labels: bool = False) -> None:
"""Helper function to visualize detections"""
for _i, det in enumerate(dets):
score_dict = det[1]
cls_idx = max(score_dict, key=score_dict.get)
conf = score_dict[cls_idx]
if conf >= thresh:
bbox = det[0]
x1, y1 = bbox.min_vertex
x2, y2 = bbox.max_vertex
ax.add_patch(Rectangle((x1, y1), x2 - x1, y2 - y1, linewidth=1, edgecolor="r", facecolor="none"))
if show_labels:
cls_label = cls_idx if isinstance(cls_idx, str) else CLASS_NAMES[cls_idx - 1]
label = f"{cls_label} {conf:.2f}"
ax.text(x1, y1 - 2, label, color="b", fontsize=8)
fig, axs = plt.subplots(2, 1, figsize=(15, 15))
axs[0].set_title("TPH-YOLOv5 Predictions")
axs[0].imshow(img)
axs[0].axis("off")
show_dets(axs[0], yolo_dets, thresh=0.4)
axs[1].set_title("CenterNet Predictions")
axs[1].imshow(img)
axs[1].axis("off")
show_dets(axs[1], centernet_dets, thresh=0.4)
Getting TPH-YOLOv5 image predictions...
Done in 0.79s
Getting CenterNet image predictions...
Done in 1.54s

Select Reference Detections
For the sake of this example, we have pre-selected four reference detections from the predictions made by each of our models to compute saliency for. We chose predictions that were made by both models (based on localization) so that we can compare their differences given a common reference. These are displayed below.
# indices of reference detections
yolo_idxs = [9, 0, 18, 4]
centernet_idxs = [2, 0, 33, 3]
yolo_ref_dets = [yolo_dets[idx] for idx in yolo_idxs]
centernet_ref_dets = [centernet_dets[idx] for idx in centernet_idxs]
fig, axs = plt.subplots(2, 1, figsize=(15, 15))
axs[0].set_title("TPH-YOLOv5 Selected Reference Predictions")
axs[0].imshow(img)
axs[0].axis("off")
show_dets(axs[0], yolo_ref_dets, thresh=0.4, show_labels=True)
axs[1].set_title("CenterNet Selected Reference Predictions")
axs[1].imshow(img)
axs[1].axis("off")
show_dets(axs[1], centernet_ref_dets, thresh=0.4, show_labels=True)

Prepare Inputs
The GenerateObjectDetectorBlackboxSaliency interface requires our reference detections to be split into separate bounding boxes and scores inputs, both as numpy arrays.
def dets_to_mats(dets: np.ndarray) -> tuple[np.ndarray, np.ndarray]:
"""Convert array of detections to score and bbox matricies"""
# use labels from first prediction to access all of them in a constant order
labels = list(dets[0][1].keys())
bboxes = np.empty((0, 4))
scores = np.empty((0, 10))
for det in dets:
bbox = det[0]
bboxes = np.vstack(
(
bboxes,
[
*bbox.min_vertex,
*bbox.max_vertex,
],
),
)
score_dict = det[1]
score_array = [score_dict[label] for label in labels]
scores = np.vstack(
(
scores,
score_array,
),
)
return bboxes, scores
yolo_bboxes, yolo_scores = dets_to_mats(yolo_ref_dets)
centernet_bboxes, centernet_scores = dets_to_mats(centernet_ref_dets)
Generate Saliency
Saliency Generation Object
We will use the RandomGridStack implementation to generate our saliency maps.
This implementation is very similar to the DRISEStack algorithm, but allows us to define the granularity of our saliency maps in pixels whereas DRISEStack uses rigid square-grids that are deformed to cover an input image which results in less control in the shape of masked regions.
For fine granularity, we use a small grid-cell size of 7x7 pixels.
To generate saliency maps that are localized and with minimal noise, we need to use a large number of occlusion masks. We use 1200 masks here.
Due to the small cell size, we need to use a higher p1 value to ensure that enough of the image is showing to detect any objects at all.
We also use set the saliency generator to use a gray fill to increase saliency map quality. This fill represents the average channel intensities of the VisDrone dataset.
from xaitk_saliency.impls.gen_object_detector_blackbox_sal.drise import RandomGridStack
sal_generator = RandomGridStack(
n=1200, # number of masks
s=(7, 7), # occlusion grid cell size in pixels
p1=0.7, # probability of not occluding cell
threads=8, # execution threads
seed=42, # seed for replicable results
)
# gray average of VisDrone
fill = [95, 96, 93]
sal_generator.fill = fill
TPH-YOLOv5
print("Generating TPH-YOLOv5 saliency maps...")
start = time.time()
yolo_sal_maps = sal_generator(img, yolo_bboxes, yolo_scores, yolo_detector)
end = time.time()
print(f"Done in {end - start:.2f}s")
Generating TPH-YOLOv5 saliency maps...
Done in 468.59s
CenterNet
print("Generating CenterNet saliency maps...")
start = time.time()
centernet_sal_maps = sal_generator(img, centernet_bboxes, centernet_scores, centernet_detector)
end = time.time()
print(f"Done in {end - start:.2f}s")
Generating CenterNet saliency maps...
Done in 1147.01s
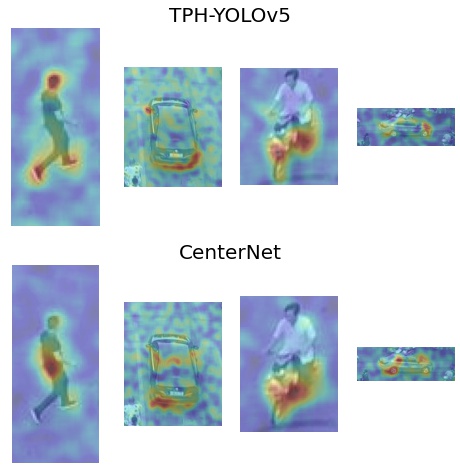
Compare Saliency
Plotting the parallel saliency maps next to each other allows us to easily compare them. We show the results for the TPH-YOLOv5 in the first row, and for CenterNet in the second row.
%matplotlib inline
gray_img = np.asarray(Image.fromarray(img).convert("L"))
pad_perc = 0.4
n = max(len(yolo_sal_maps), len(centernet_sal_maps))
fig, axs = plt.subplots(2, n, figsize=(8, 8))
for i, ax in enumerate(axs[0]):
try:
sal_map = yolo_sal_maps[i]
except IndexError:
ax.axis("off")
continue
x1, y1, x2, y2 = yolo_bboxes[i]
pad_x = pad_perc * (x2 - x1)
pad_y = pad_perc * (y2 - y1)
x1 = max(int(x1 - pad_x), 0)
y1 = max(int(y1 - pad_y), 0)
x2 = int(x2 + pad_x)
y2 = int(y2 + pad_y)
img_crop = gray_img[y1 : (y2 + 1), x1 : (x2 + 1)]
sal_crop = sal_map[y1 : (y2 + 1), x1 : (x2 + 1)]
ax.imshow(img_crop, alpha=0.7, cmap="gray")
ax.imshow(sal_crop, alpha=0.3, cmap="jet")
ax.axis("off")
for i, ax in enumerate(axs[1]):
try:
sal_map = centernet_sal_maps[i]
except IndexError:
ax.axis("off")
continue
x1, y1, x2, y2 = centernet_bboxes[i]
pad_x = pad_perc * (x2 - x1)
pad_y = pad_perc * (y2 - y1)
x1 = max(int(x1 - pad_x), 0)
y1 = max(int(y1 - pad_y), 0)
x2 = int(x2 + pad_x)
y2 = int(y2 + pad_y)
img_crop = gray_img[y1 : (y2 + 1), x1 : (x2 + 1)]
sal_crop = sal_map[y1 : (y2 + 1), x1 : (x2 + 1)]
ax.imshow(img_crop, alpha=0.7, cmap="gray")
ax.imshow(sal_crop, alpha=0.3, cmap="jet")
ax.axis("off")
axs = fig.subplots(2, 1)
axs[0].set_title("TPH-YOLOv5", fontsize=20)
axs[0].axis("off")
axs[1].set_title("CenterNet", fontsize=20)
_ = axs[1].axis("off")